-
MotionWAM: Towards Foundation World Action Models for Real-Time Humanoid Loco-Manipulation
Jia Zheng, Teli Ma, Yudong Fan, Zifan Wang, Shuo Yang*,
Junwei Liang*
ArXiv
-
Perceptive Behavior Foundation Model Adapting Human Motion Priors to Robot-Centric Terrain
Zifan Wang, Yizhao Li, Teli Ma, Qiang Zhang, Yudong Fan, Hao Xu, Shuo Yang*,
Junwei Liang*
ArXiv
-
DiT4DiT: Jointly Modeling Video Dynamics and Actions for Generalizable Robot Control
Teli Ma, Jia Zheng, Zifan Wang, Chunli Jiang, Andy Cui,
Junwei Liang*, Shuo Yang*
ArXiv
-
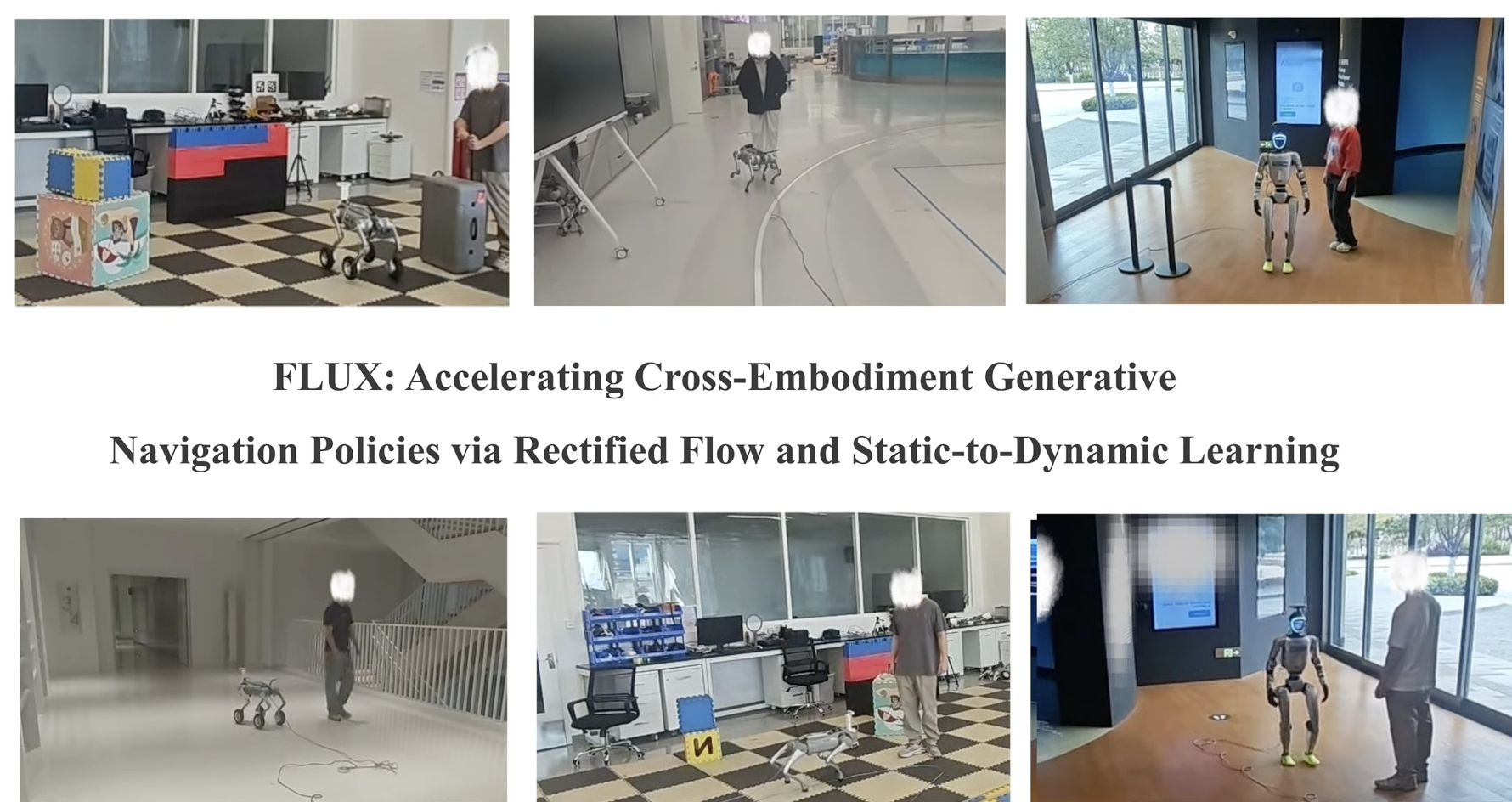
FLUX: Accelerating Cross-Embodiment Generative Navigation Policies via Rectified Flow and Static-to-Dynamic Learning
Zeying Gong, Yangyi Zhong, Yiyi Ding, Tianshuai Hu, Guoyang Zhao, Lingdong Kong, Rong Li, Jiadi You, Junwei Liang*
IROS 2026
-
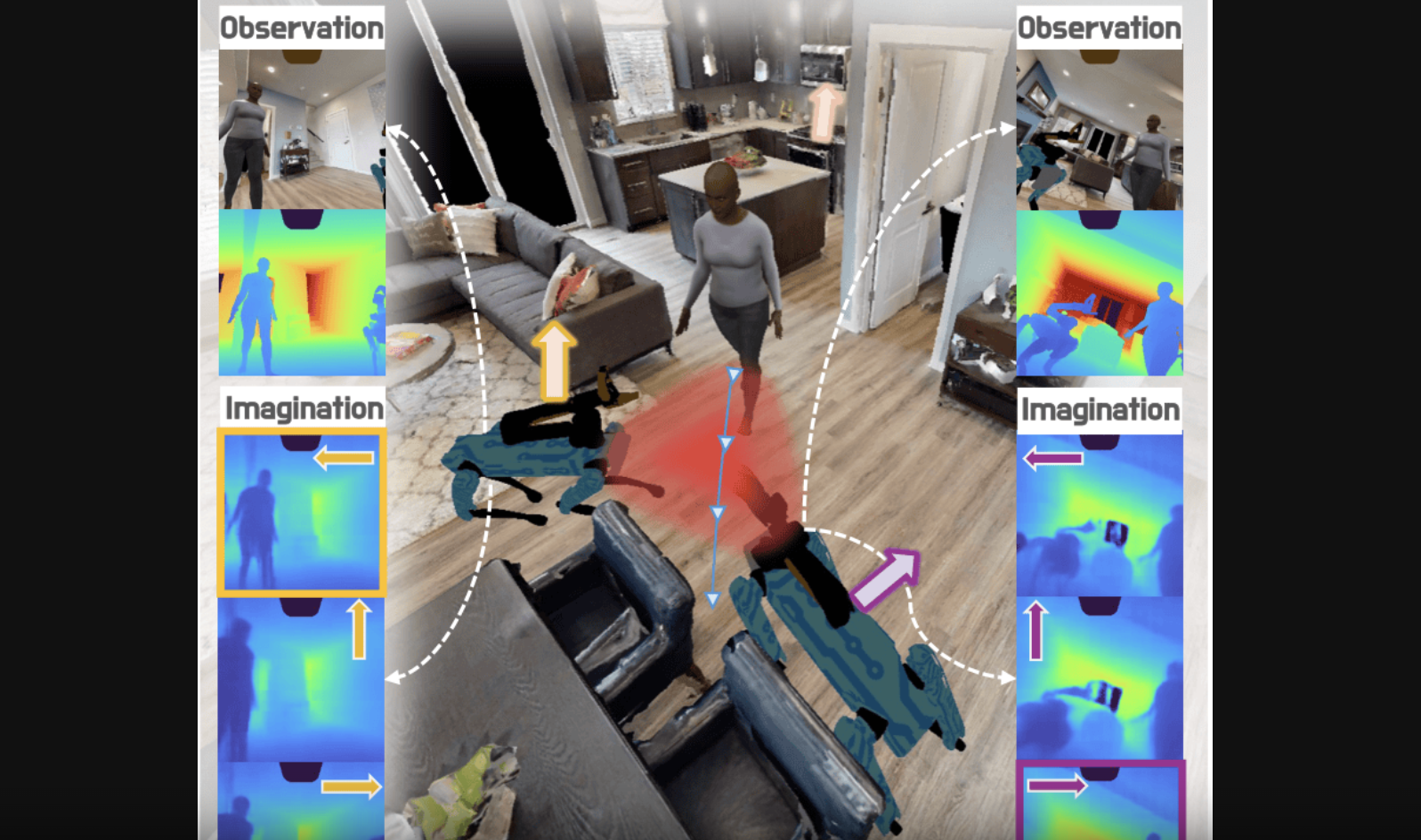
NavThinker: Action-Conditioned World Models for Coupled Prediction and Planning in Social Navigation
Tianshuai Hu, Zeying Gong, Lingdong Kong, XiaoDong Mei, Yiyi Ding, Qi Zeng, Ao Liang, Rong Li, Yangyi Zhong, Junwei Liang*
IROS 2026
-
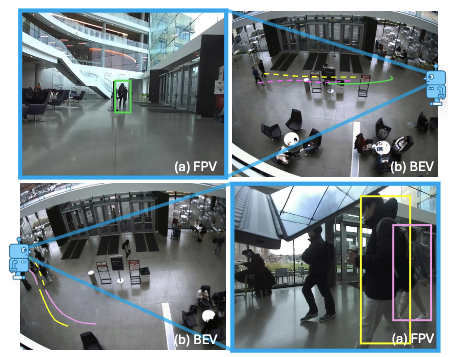
EgoTraj-Bench: Towards Robust Trajectory Prediction Under Ego-view Noisy Observations
Jiayi Liu, Jiaming Zhou, Ke Ye, Kun-Yu Lin, Allan Wang, Junwei Liang*
ICRA 2026
-
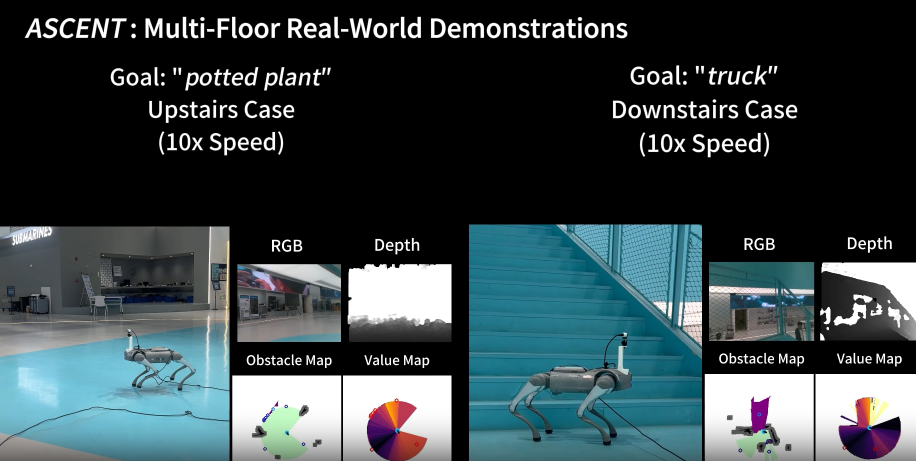
Stairway to Success: Zero-Shot Floor-Aware Object-Goal Navigation via LLM-Driven Coarse-to-Fine Exploration
Zeying Gong, Rong Li, Tianshuai Hu, Ronghe Qiu, Lingdong Kong, Lingfeng Zhang, Yiyi Ding, Leying Zhang, Junwei Liang*
IEEE Robotics and Automation Letters (RA-L) 2026
-
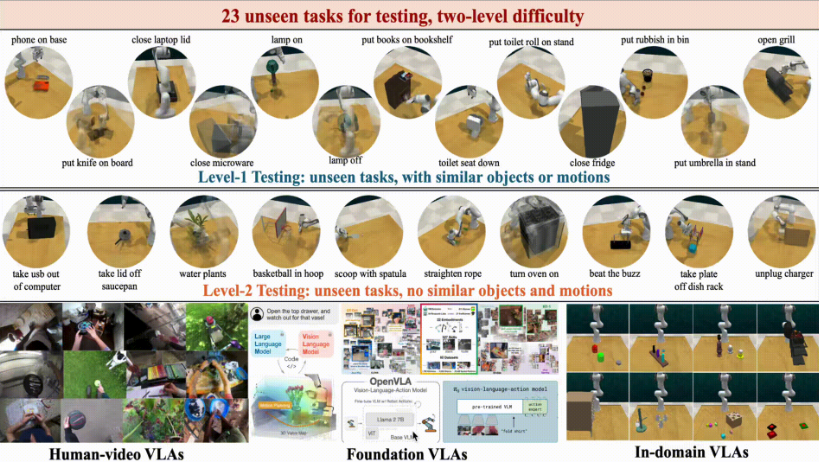
Exploring the Limits of Vision-Language-Action Manipulations in Cross-task Generalization
Jiaming Zhou, Ke Ye, Jiayi Liu, Teli Ma, Zifan Wang, Ronghe Qiu, Kun-Yu Lin, Zhilin Zhao, Junwei Liang*
NeurIPS 2025
-
GLOVER++: Unleashing the Potential of Affordance Learning from Human Behaviors for Robotic Manipulation
Teli Ma, Jia Zheng, Zifan Wang, Ziyao Gao, Jiaming Zhou, Junwei Liang*
CoRL 2025
-
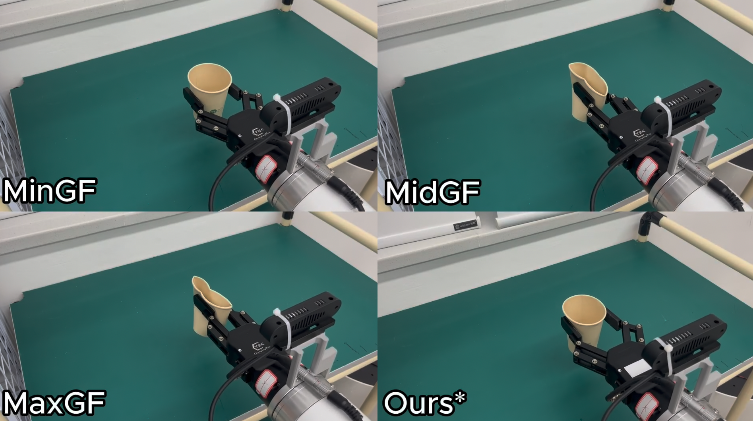
GLOVER: Generalizable Open-Vocabulary Affordance Reasoning for Task-Oriented Grasping
Teli Ma, Zifan Wang, Jiaming Zhou, Mengmeng Wang, Junwei Liang*
CoRL 2025 GenPriors Workshop
🥇Best Paper Award
-
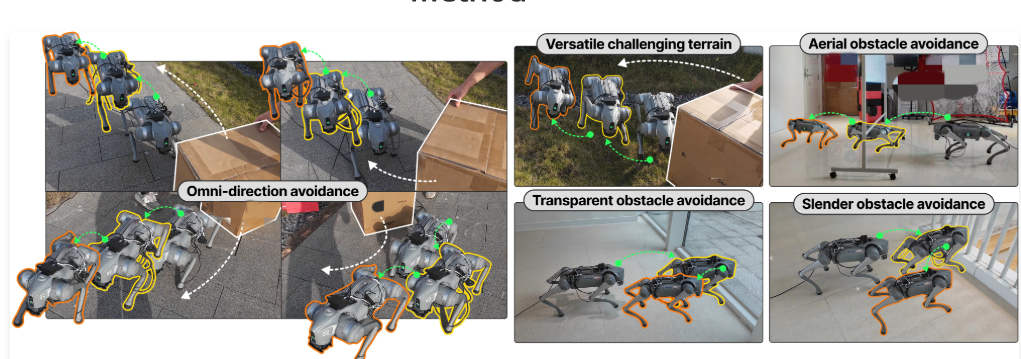
Omni-Perception: Omnidirectional Collision Avoidance for Legged Locomotion in Dynamic Environments
Zifan Wang, Teli Ma, Yufei Jia, Xun Yang, Jiaming Zhou, Wenlong Ouyang, Qiang Zhang, Junwei Liang*
CoRL 2025
(Oral, ~5% acceptance rate)
-
3EED: Ground Everything Everywhere in 3D
Rong Li, Yuhao Dong, Tianshuai Hu, Ao Liang, Youquan Liu, Dongyue Lu, Liang Pan, Lingdong Kong, Junwei Liang*, Ziwei Liu*
NeurIPS 2025
-
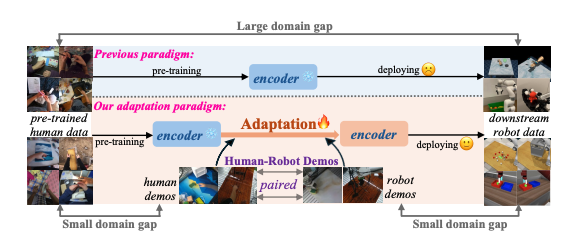
Mitigating the Human-Robot Domain Discrepancy in Visual Pre-training for Robotic Manipulation
Jiaming Zhou, Teli Ma, Kun-Yu Lin, Ronghe Qiu, Zifan Wang, Junwei Liang*
CVPR 2025
-
SeeGround: See and Ground for Zero-Shot Open-Vocabulary 3D Visual Grounding
Rong Li, Shijie Li, Lingdong Kong, Xulei Yang, Junwei Liang*
CVPR 2025
-
From Cognition to Precognition: A Future-Aware Framework for Social Navigation
Zeying Gong, Tianshuai Hu, Ronghe Qiu, Junwei Liang*
ICRA 2025
-
GaussianProperty: Integrating Physical Properties to 3D Gaussians with LMMs
Xinli Xu, Wenhang Ge, Dicong Qiu, ZhiFei Chen, Dongyu Yan, Zhuoyun Liu, Haoyu Zhao, Hanfeng Zhao, Shunsi Zhang, Junwei Liang*, Ying-Cong Chen*
ICCV 2025
-
Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
Teli Ma, Jiaming Zhou, Zifan Wang, Ronghe Qiu, Junwei Liang*
CoRL 2024
-
Prioritized Semantic Learning for Zero-shot Instance Navigation
Xinyu Sun, Lizhao Liu, Hongyan Zhi, Ronghe Qiu, Junwei Liang*
ECCV 2024
-
Dragtraffic: Interactive and Controllable Traffic Scene Generation for Autonomous Driving
Sheng WANG, Ge SUN, Fulong MA, Tianshuai HU, Qiang QIN, Yongkang SONG, Lei ZHU, Junwei Liang*
IROS 2024
-
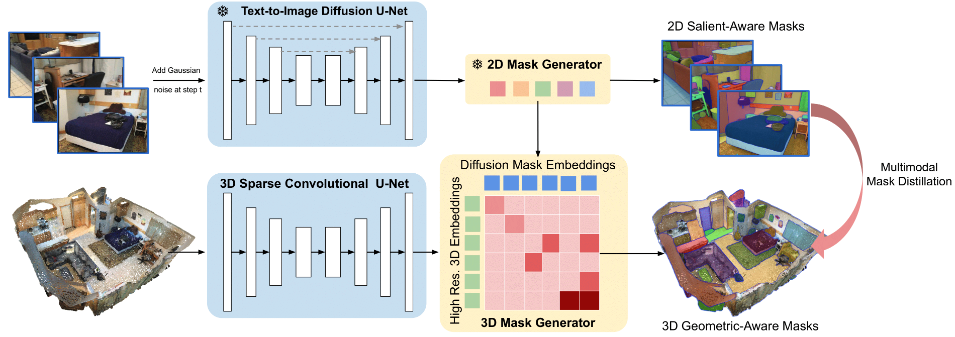
Open-Vocabulary 3D Semantic Segmentation with Text-to-Image Diffusion Models
Xiaoyu Zhu, Hao Zhou, Pengfei Xing, Long Zhao, Hao Xu, Junwei Liang, Alexander Hauptmann, Ting Liu, Andrew Gallagher
ECCV 2024
-
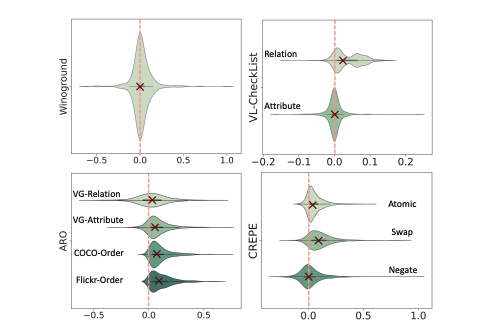
An Examination of the Compositionality of Large Generative Vision-Language Models
Teli Ma, Rong Li, Junwei Liang*
NAACL 2024